The three-phase motor wiring can be connected in star (Y) connection, which is suitable for low starting current, and triangle (Δ) connection for full power operation. The dual voltage connection is suitable for 220V/380V switching. The star-delta starting reduces the starting current. The forward and reverse wiring realizes the direction switching through the interlocking circuit. The terminals marked with U1, V1, etc. in the terminal box need to be connected correctly.
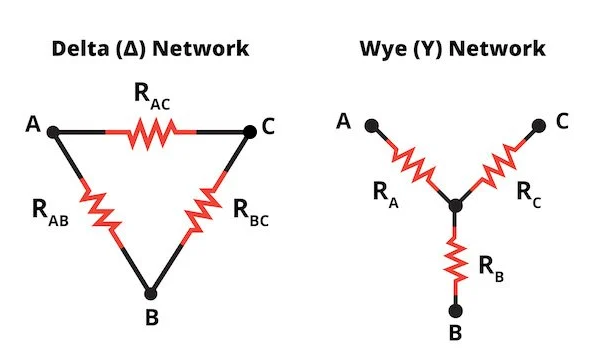
Star (Y) connection
The core of the star connection is to connect one end of the three-phase winding to a common point. This common point is usually called the “neutral point”; the other end is connected to the A, B, and C terminals of the three-phase power supply respectively. The advantage of wiring in this way is that the voltage load of the winding can be reduced, which is usually particularly common in light load or starting stages. When preparing, make sure that the terminals in the motor terminal box are clearly marked. U1, V1, W1 and U2, V2, W2, these marks are the “map” of the wiring. Mistakes may cause the motor to run unstably or burn out.
In actual operation, some terminal box layouts may not be intuitive. The trick is to test the resistance value of each winding with a multimeter to ensure that the terminals you connect correspond to the two ends of the same winding. Connect U2, V2 and W2 together to form a neutral point, and connect U1, V1, and W1 to the three-phase power supply respectively. After the wiring is completed, remember to check the insulation resistance to ensure that there is no risk of short circuit or leakage. If you find that the motor is abnormal during operation, such as vibration, excessive noise, or rapid temperature rise, it may be due to incorrect wiring or unbalanced three-phase voltage. At this time, you can use a phase sequence meter to check whether the phase sequence of the power supply is correct, and readjust the wiring if necessary.
Before wiring, be sure to cut off the power supply and mark it clearly to prevent accidental power-on. If you are a novice, it is recommended to find an experienced person to guide you first. Although the star connection method seems simple, details determine success or failure.

Triangle (Δ) connection method
This connection method mainly connects the two ends of each winding directly to the two phases of the power supply to form a closed loop. It is suitable for scenarios with full load or higher starting torque. Before you begin, make sure you have all the tools at hand: a multimeter, insulating tape, a screwdriver, and a motor wiring diagram. The terminal markings on motors of different brands or models are slightly different. The key to the triangle connection is to connect U1 and W2, V1 and U2, and W1 and V2 respectively – just like connecting three cables into a closed triangle.
The space in the terminal box is small, and it is easy to get confused when the cables are squeezed together. It is recommended to bundle the corresponding cables with cable ties first, sort out the order, and then connect them one by one. After completing the connection, don’t rush to power on. Use a multimeter to check the resistance value of each line first. Under normal circumstances, the resistance values should be consistent or very close. If you find a significant difference, you have to recheck the winding connection.
The triangle connection method has high requirements for the phase sequence and voltage stability of the power supply. Before powering on, it is best to use a phase sequence meter to confirm whether the phase sequence is correct. If you find that the direction of the motor is wrong when running, just adjust the position of any two power cords. Be sure to observe the sound and vibration of the motor when starting. If there is abnormal noise, severe shaking, or the motor overheats, you must immediately turn off the power for inspection. These symptoms may be caused by winding short circuit, loose wiring or unbalanced power supply.
Star-delta starting wiring
When the motor starts, the winding runs in star (Y) connection. At this time, the voltage of each phase winding is 1/√3 of the line voltage, reducing the starting current. After the motor accelerates to close to the rated speed, the contactor will switch the connection mode to triangle (Δ), and the motor will enter the full voltage operation state. This connection method requires that your motor must be six-terminal winding (U1, V1, W1 and U2, V2, W2) and can adapt to star-delta switching.
Wiring steps:
Prepare three contactors: main contactor (K1), star contactor (K2), and delta contactor (K3);
Connect U1, V1, and W1 to the three-phase end of the power supply
Connect U2, V2, and W2 to the output end of the star contactor and to the input end of the delta contactor;
After completing the electrical connection, don’t forget to install a thermal relay to protect the motor from overload.
During the debugging process, you may encounter a sudden stop of the motor when switching to the delta connection, or abnormal running direction of the motor. In most cases, these problems are caused by wrong phase sequence or asynchronous contactor action. You can use a phase sequence table to check the wiring one by one to ensure that the power supply and motor phase sequence are consistent. In addition, at the moment of switching from star to delta, if you hear the contactor “clicking” but the motor does not respond, it is likely that the switching time is improper. Adjust the delay parameters of the time relay to allow the motor to switch after sufficient acceleration.
Forward and reverse wiring
To achieve forward and reverse control, two contactors (usually called forward contactor and reverse contactor) and an interlocking device are required. When wiring,
First connect the three phases of the power supply to the main contactor, and then connect the output of the main contactor to the forward and reverse contactors;
The output of the forward contactor is directly connected to the U, V, and W terminals of the motor;
For the output of the reverse contactor, any two phases need to be cross-connected; for example, U and V are interchanged.
When switching forward and reverse, it is necessary to prevent the two contactors from operating at the same time, and electrical interlocking and mechanical interlocking are required to ensure safety. Electrical interlocking can be achieved with auxiliary contacts. When the forward contactor is energized, the control circuit of the reverse contactor is cut off, and vice versa. Mechanical interlocking directly prevents the two contactors from being energized at the same time through physical devices.
Sometimes the motor does not rotate after pressing the forward button, or the reverse button does not work. These problems are usually related to incorrect wiring or poor contact of the auxiliary contacts of the contactor. Check the control circuit connections one by one to see if they are correct, especially the working status of the interlock contacts. If everything is normal but the motor still cannot be started, it may be that the control power supply voltage is unstable or the relay is aging.


