naturally create a rotating magnetic field due to the 120-degree phase difference in the three-phase current, directly driving the rotor’s rotation without the need for capacitors to assist starting or maintain torque output, making the structure simpler and the operation more stable.
How It Works
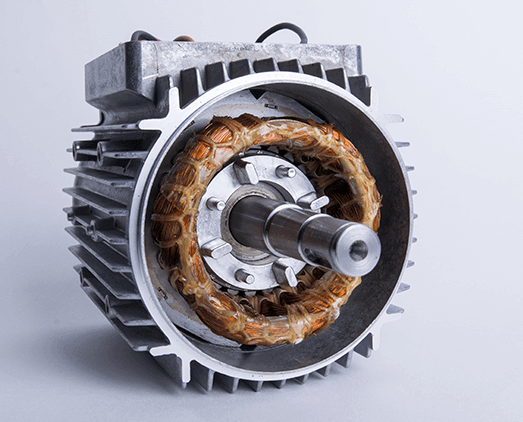
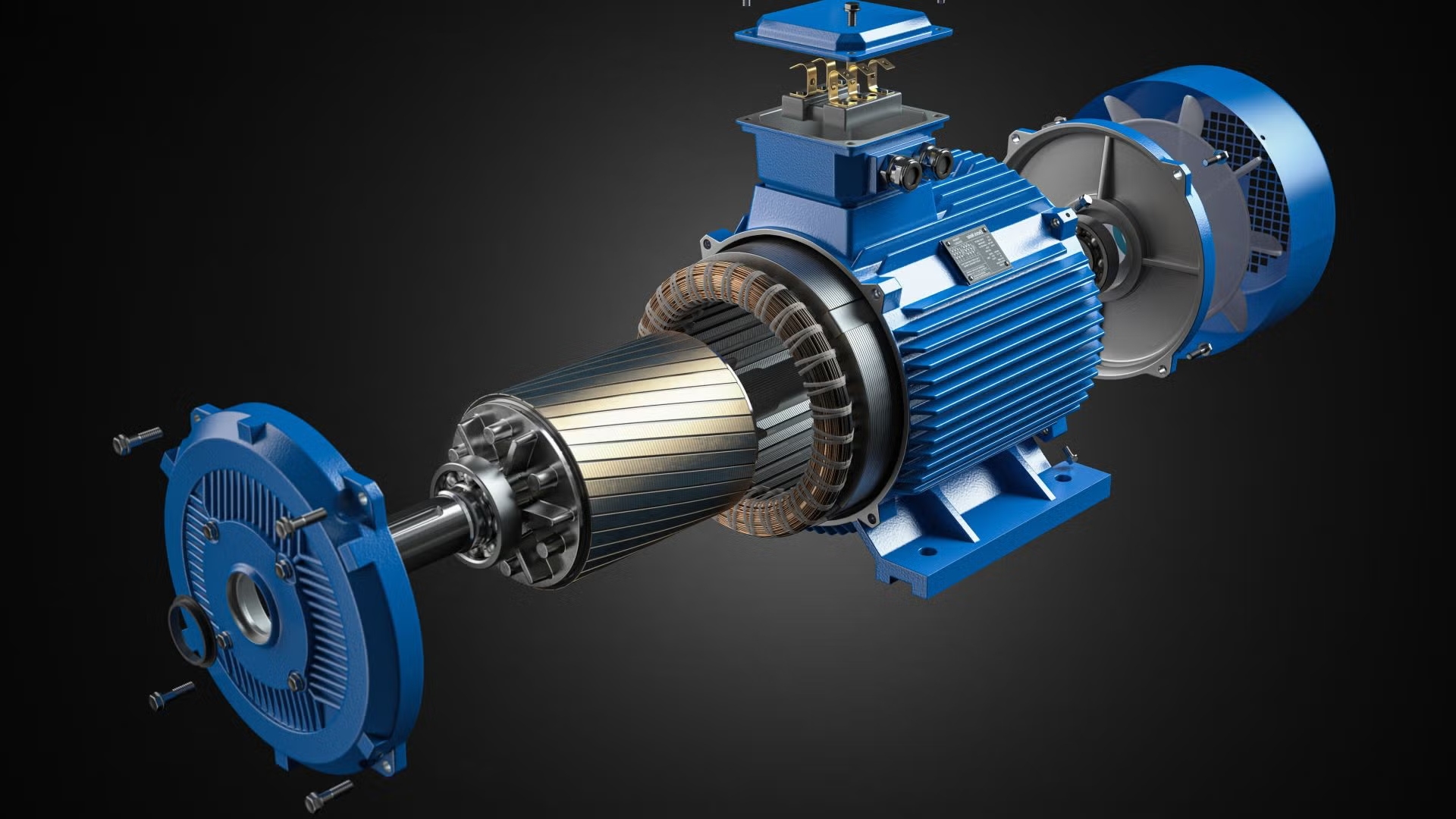
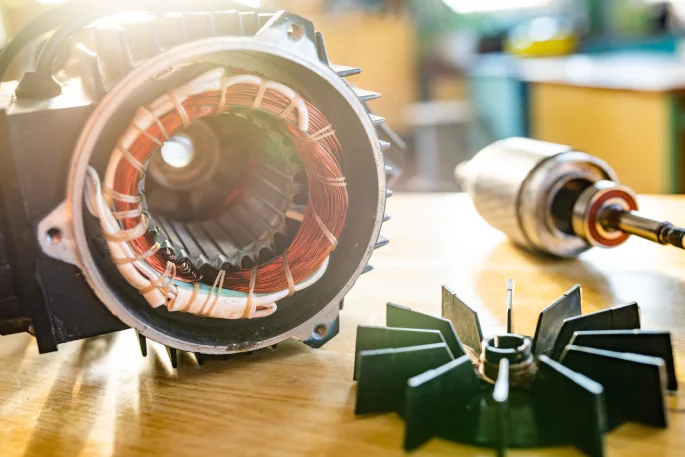
The of the three-phase motor includes its peculiar three-phase power system. In the three-phase motors, the stator windings are usually divided into three groups of coils, 120 degrees apart from each other, with every coil connected to one of the three-phase power supply phases that also are 120-degree out-of-phase. When three-phase current flows into the stator windings, each phase current generates a magnetic field in space according to its phase. Through the superposition and displacement of these three-phase magnetic fields, a rotation magnetic field with constant speed is formed. The rotating magnetic field cuts the rotor conductor and hence induces a current in the rotor; the interaction of the induced current with the rotating magnetic field finally acts to drive the rotation of the rotor. This acting principle is based on Faraday’s law of electromagnetic induction and Lenz’s law.
In any three-phase motor, there is a specific synchronous speed, which is a kind of maximum limit for the rotation speed, and can be given by the general formula: Ns = (120f) / p, where f is the frequency of the power supply, while p refers to the number of pole pairs. During operation, the rotor is always at a speed slightly lesser than that of the synchronous. The difference is something known as slip, given by s = (Ns – Nr) / Ns, in which Nr is the rotor’s real speed. This slip enables the sliding for the rotor to keep gaining electromagnetic induction from the stator’s rotating magnetic field.
Power Phases
Within a three-phase motor, the three-phase power system is one of the factors integrated into the of that kind of motor. Normally, three-phase power consists of three voltage sources with the same amplitude and a phase difference of 120 degrees. Unlike single-phase current with only one voltage fluctuation, due to the phase voltage differences, three-phase power can produce a stable rotating magnetic field. With a three-phase power supply, the phase difference between each phase is constant; this, in turn, creates a kind of “rotating vector” or “rotating wave” whose mean value is almost zero, which avoids voltage shifts.
The phase structure of three-phase power allows better load balancing in industrial applications. The even distribution of load would also contribute to reducing fluctuations in current and, hence, power loss in the power network. The interaction among these three-phase voltage waveforms provides a rotating magnetic field that is stable and promptly responsive to changes in load. The three-phase system can avoid “zero-sequence currents” – the problem of return currents commonly found in single-phase systems and thus reduce losses in cables and grounding and improve efficiency in the power system. Due to this characteristic, three-phase systems have a tremendous advantage in balanced and stable power output; therefore, they are suitable for heavy motors and continuous operations under industrial conditions.
No Capacitor
As the three-phase motors have a natural phase difference in their supply of power, running them does not necessitate since the rotating magnetic field required can be generated directly. On the contrary, single-phase motors have one phase in power and, thus, cannot develop a rotating magnetic field by nature; a capacitor is required for phase-shifting purposes to enable the start-up. In the capacitor-run single-phase motor, the capacitor creates a capacitive phase angle to allow the magnetic field that is generated from the current in the starting winding to be 90 degrees out of phase from the magnetic field generated by the main winding; therefore, startup occurs.
Because a three-phase motor draws its power from a power source that is out of phase by 120 degrees on each of the three windings, a phase shift naturally creates a rotating magnetic field without the need for a capacitor. Without the need for a capacitor, the structure of a three-phase motor becomes simpler with fewer components and increased stability. Capacitors are prone to deterioration, particularly in use cases involving high frequency, which constitutes one of the main problems that three-phase motors avoid. Further, this is one of the main reasons why three-phase motors see broader utilization in industrial services, as it also excludes maintenance for the capacitor.
Torque Creation
The production of torque in a three-phase motor results as a product of interaction between the and the rotor conductors. At its very beginning, the rotating magnetic field cuts through the rotor conductors at the start and induces an electromotive force in the rotor that causes an induced current. Since this current is within the magnetic field, from the left-hand rule, it carries a force that actually drives the rotation of the rotor. The magnitude of this force is directly related to the motor torque.
The general relation for torque output for a three-phase motor is T = k*Φ*I*cosθ, where k is a proportional constant, Φ is the magnetic flux, I is rotor current, and θ is the phase angle of current. This equation shows that torque in a three-phase motor is proportional to both current and magnetic flux. Due to the fact that a three-phase motor has the phase currents naturally leading from one another by 120 degrees in each cycle, it can keep the magnitude and direction of a rotating magnetic field unchanged. This provides continuous and stable torque, which meets the demand of various kinds of loads.
In heavy industrial equipment, this is a very essential aspect for any three-phase motor since it can be provided with more torque redundancy when fluctuations in load occur, thereby preventing the rotor from “stalling” or overheating. Like the influences of the stator magnetic field and rotor current, the torque of a three-phase motor is also a function of slip – the difference between the rotor’s actual speed and the synchronous speed. This mechanism enables the three-phase motor to automatically adjust its torque output with increasing load, while providing stable operation.
Phase Shift
Phase shifting is among the important features for the three-phase motor to have its effective running. In three-phase systems, the phase of each current differs by 120 degrees, and this design avoids the problem of phase “overlapping.” This produces a continuous rotating magnetic field. Single-phase motors, on the other hand, have only one voltage phase and need capacitors in order to artificially create phase difference to make the motor produce a rotating magnetic field. This means that in three-phase motors, the 120-degree phase difference is enough to create the continuous rotation of the magnetic field without any additional devices.
also effectively reduces vibration and noise in the motor. In a three-phase motor, each phase of the magnetic field creates its driving force independently, and because these phases are always in balance, it never has to experience sudden changes in torque, thus creating less vibration during operation. Such a balanced structure increases not only the durability of this motor but also diminishes energy loss and mechanical wear resulting from vibration. This, therefore, brings about stability in the performance of the three-phase motor even in high load or high-speed conditions.
The phase shift thus enables the operation of the motor to be smooth under variable conditions of load. If the load is increased, the slip increases, and automatically the phase of the current changes in such a way that the lag angle of the current increases, hence increasing torque output. With this characteristic, the three-phase motors can provide the required torque in diverse working conditions, hence satisfying the requirements for many industrial equipment.
Efficiency Boost
The three-phase motor has a design structure that enables it to achieve high efficiency in energy conversion. The absence of the capacitor reduces the reactive power loss in the circuit during operation, thereby giving improved efficiency. A three-phase motor provides efficiency not only in terms of energy conversion rate but also in its adaptability to load and low current harmonics.
In , the three-phase motor is superior to a single-phase motor. It has less energy loss and generates less heating. That is because the phase balance characteristic of the three-phase motor makes for better power factor and energy utilization, thus avoiding the reactive power loss common in single-phase motors. Besides, the three-phase motor can regulate the speed by adjusting its input power frequency while maintaining high efficiency under different load conditions.
Motor Control
Special advantages exist in the control of , especially for modern industrial automation. Frequency variable devices such as VFDs have made possible the flexible change of speed, torque, and even rotation direction in a three-phase motor. A VFD controls the motor’s speed through changes in the input frequency and voltage. Frequency control is smoother in the phase design of a three-phase system; accordingly, there will not be any mechanical shocks because in acceleration and deceleration the torque does not vary suddenly.
This makes the three-phase motor unparalleled in the production lines that require real-time adjustment with the accurate control of the motor. The dynamic production equipment on the assembly line can adjust the speed and power output according to product requirements, which remarkably enhances the flexibility and efficiency of the production lines. In addition, the technology in the control of the three-phase motor also established an important position in smart manufacturing. Three-phase motors satisfy such high-precision demands in complicated working conditions due to their efficient, stable, and controllable nature in robotics and automation applications